|
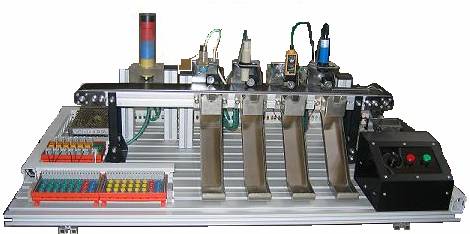
PF-JD102材料分拣装置是全电动的微缩模型,它使用了PLC、传感器、位置控制、电气传动和直流电机拖动等技术,可以实现不同材料的自动分拣和归类功能,适用于无气源的场合。 该装置采用台式结构,配有控制器(PLC)、传感器(光电式、电感式、电容式、颜色、磁感应式)、旋转编码器、交流电动机、输送带、直流电动机和直流电源等,构成典型的机电一体化教学装置。
PF-JD102材料分拣装置

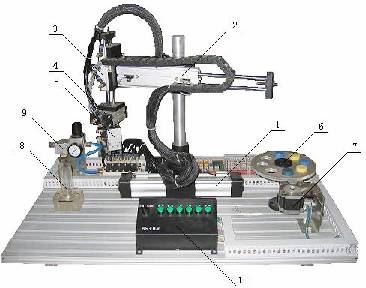
机械手模型教学装置是一个模拟工业生产过程中自动化设备周边常见机械手的微缩模型,它使用了PLC、传感器、位置控制、步进控制和气动等技术,具有零组件的自动输送、取拿和移送功能,也可配置监控软件由上位计算机监控。适用于各类学校机、电专业的教学演示、教学实验、实习培训和课程设计,可以培养学生对PLC控制系统硬件和软件的设计与调试能力;分析和解决系统调试运行过程中出现的各种实际问题的能力。
该装置采用架式结构,由气动组立机械手、机械手旋转机构、链条式输送机、储料位、操作面板等组成,并配有控制器(PLC)、传感器(光电式、电磁式)、步进电机、直流电机、操作按钮、电磁阀、减压阀等,构成典型的机电一体化教学模型。
PF-JD201机械手模型
该装置采用台式结构,由气动组立机械手、旋转式供料盘、传送带、操作面板等组成,并配有控制器(PLC)、传感器(光电式、电磁式)、步进电机、操作按钮、电磁阀、减压阀等,构成典型的机电一体化教学模型。
PF-JD202机械手模型
该装置采用台式结构,由气动组立机械手、旋转式供料盘、储料仓、操作面板等组成,并配有控制器(PLC)、传感器(光电式、电磁式)、步进电机、操作按钮、电磁阀、减压阀等,构成典型的机电一体化教学模型。
PF-JD203机械手模型

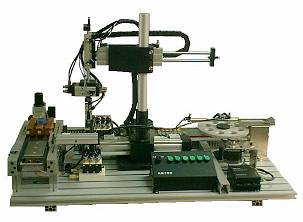
该装置为全电动机械手模型,采用架式结构,机械部件有滚珠丝杠、滑轨、传动齿轮等,电气部件有步进电机及驱动模块、直流电机及驱动模块、旋转编码器、传感器等。并配有操作平台、控制器(PLC)、操作按钮、电源系统及急停按钮等,构成典型的机电一体化教学模型。
PF-JD204机械手模型

自动立体仓库教学装置是一个模拟自动化生产过程中仓储环节的微缩模型,它使用了PLC、传感器、位置控制、步进控制和电气传动等技术,具有货物的自动提取和存放功能,也可配置监控软件由上位计算机监控。适用于各类学校的机、电专业的教学演示、教学实验、实习培训和课程设计,可以培养学生对PLC控制系统硬件和软件的设计与调试能力;分析和解决系统调试运行过程中出现的各种实际问题的能力。
该装置采用台式结构,由立体库位框架、巷道式高叉车、操作显示盘等组成,并配有控制器(PLC)、传感器(光电式、触点式)、步进电机、直流电机、键盘及驱动系统等,构成典型的机电一体化教学模型.
PF-JD301自动立体仓库模型
| 锅炉过程控制实验模型主要用于过程控制理论的研究,以锅炉为对象,配以高位水箱,液位水槽,循环水泵以及相应的检测仪表,执行机构,调节阀等装置。通过DeviceNet™ 设备网和以太网把生产控制过程和RSBizware™ Historian 信息处理系统联系起来,把过程参数、设备状态等数据传送给过程监控系统。通过该模型,可以实践数字PID控制、多变量解藕控制,神经元网络控制等方法,为解决锅炉控制过程中存在的大滞后、非线性时变等关键技术问题提供了研究手段。该模型由上海奇鑫公司制作,上海交通大学和东北大学已经在实验室采购。 |
 |
| 锅炉过程控制实验模型 | |
 |
| 火车调度模型系统 | |
火车调度模型系统有多部火车及相应轨道组成,通过设计一些针对交通、物流的调度算法并在本系统平台上得以验证,能够熟悉罗克韦尔自动化的工业网络结构和软件平台,掌握可编程控制器的原理和相关软件的使用方法。该模型由上海交通大学罗克韦尔自动化实验室制作,曾在“挑战杯”中获奖。 |
| 电梯群控模型由四部十层电梯模型配合相应的控制设备构成,可以进行逻辑控制、调速控制、优化调度控制等实验。通过罗克韦尔自动化的DeviceNet™设备网和ControlNet™控制网进行现场信号传输,配合RSView32™进行监控,运用自适应群控算法,根据采集到的电梯群呼梯信号及运行的状况,进行分析综合后按一定的规则向各个电梯发出控制信号,指挥电梯协调地运行,达到最高运行效率。该模型由东北大学罗克韦尔自动化实验室制作,获得2001年“挑战杯”三等奖。 |
 |
| 电梯群控模型 | |
其它实验对象模型
| 





